8.2. 数学原理
本文最后更新于 2025年6月4日 晚上
数学原理
回顾:向量的点乘
对于向量\(u=[\begin{smallmatrix}
u_1 \\
u_2
\end{smallmatrix}]\),\(v=[\begin{smallmatrix}
v_1 \\
v_2
\end{smallmatrix}]\),定义向量的点乘为:\(u^Tv=||v||cosθ||u||\)。
其中\(||u||\)称为\(u\)的模长:\(||u||=√{u_1^2+u_2^2}\);定义\(||v||cosθ=p\),它是v在u上的投影。
优化函数的几何意义
对于svm的目标优化函数: 即存在\(min_θ\frac{1}{2}∑θ^2\),使得满足如果\(y^{(i)}=1,θ^Tx^{(i)}≥1\),\(y^{(i)}=0,θ^Tx^{(i)}≤-1\)。
现在为了简化运算,假定\(θ_0=0\),有且仅有两个参数,此时\(\frac{1}{2}∑θ^2=\frac{1}{2}(√{θ_1^2+θ_2^2})^2\)。
\(√{θ_1^2+θ_2^2}\)可以看做是向量\(Θ\)的模长,因此目标优化函数可以看做是0.5倍参数向量\(Θ\)长度的平方:
\[\frac{1}{2}∑θ^2=\frac{1}{2}||Θ||^2\]
现在来分析\(,θ^Tx^{(i)}\)的几何意义,按照向量的点乘法则,可以看做是向量\(x^{(i)}\)在\(Θ\)上的投影\(p^{(i)}\)与\(||Θ||\)相乘。
现在优化函数就可以表示成:
存在\(min_θ\frac{1}{2}||Θ||^2\),使得:
如果\(y^{(i)}=1,p^{(i)}||Θ||≥1\),
如果\(y^{(i)}=0,p^{(i)}||Θ||≤-1\)
现在来考虑svm对线性可分样本的分类:
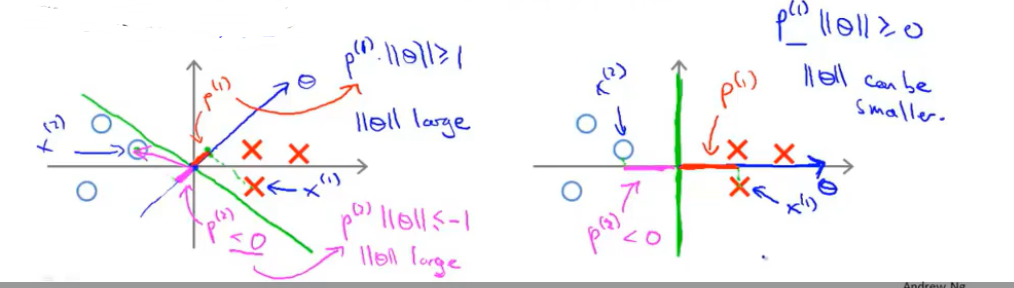
如果决策边界与样本边界的间距很小,由于参数向量与决策边界是始终正交的,那么每一个样本到参数向量的投影\(p^{(i)}\)都很小,想要使得\(p^{(i)}||Θ||≥1\)或者\(p^{(i)}||Θ||≤-1\)就需要\(||Θ||\)非常的大。(下图左)
反之如果决策边界与样本边界的间距很大,那么\(||Θ||\)就可以小一些。(下图右)
因此决策向量机总是使得决策边界具有大间距的特性。
由于决策边界的上方有\({x^{(i)}}^T||Θ||>0\),下方有\({x^{(i)}}^TΘ<0\),因此直线上必定有\({x^{(i)}}^T||Θ||=0\)。
因此参数向量与决策边界是始终正交的。