09. 系统方程
本文最后更新于 2025年6月4日 晚上
系统方程
系统方程概述
对于一个有输入和输出的系统,可以通过观察系统输入和输出的关系来建立描述系统的方程,在拉普拉斯变换的s域下,系统方程可以表述为系统输出与输入之比:
\[ H(s)=\frac{R(s)}{E(s)}\] 也可以按照时域分析方法中的理解,当\(e(t)=δ(t)\)时,其拉普拉斯变换为1,因此系统方程也是输入为冲激函数时的系统输出。
类型
策动点方程
当系统是一个单口网络(One-port network,输入和输出在同一个端口的系统)时,系统方程称为策动点方程(Driving point funtion)。对于电路分析,单口网络的系统方程可以是\(H(s)=\frac{I(s)}{V(s)}\),也可以是\(H(s)=\frac{V(s)}{I(s)}\)。
传递函数
当系统是一个两口网络时,此时的系统方程称为传递函数(Transfer function)。分析时需要找到电路的输入和输出,作比即可得到传递函数。
连接
并联
如果两个系统并联,新的系统方程为:\(h(t)=h_1(t)+h_2(t)\),在s域内:
\[H(s)=H_1(s)+H_2(s)\]
串联/级联
如果两个系统串联,新的系统方程为:\(h(t)=h_1(t)*h_2(t)\),在s域内:
\[H(s)=H_1(s)H_2(s)\]
举例:放大器的并联和串联
系统方程的结构
如之前提到的拉普拉斯反变换和z反变换,由于系统输入和输出在s域内都以多项式表示,系统方程自然是两个多项式的比值: \[H(s)=\frac{R(s)}{E(s)}=K\frac{Π(s-z_i)}{Π(s-p_k)}\] 其中\(p_i\)称为系统方程的极点,\(z_k\)称为系统方程的零点。
在电路分析中,极点描述的的对象是电路中电容和电感的个数,即系统方程的阶数。
同理,离散系统的方程也可以写作两个多项式的比: \[H(z)=\frac{∑b_rz^{-r}}{∑a_kz^{-k}}=A_0+∑\frac{A_kz}{z-p_k}\]
强迫响应和自由响应
如果将系统的输入\(E(s)\)以多项式表示:\(E(s)=\frac{Π(s-z_l)}{Πs-p_k}\),系统方程\(H(s)=\frac{Π(s-z_j)}{Πs-p_i}\),由系统的零输入响应\(R(s)=E(s)H(s)\):
\[R(s)=∑\frac{A_k}{s-p_k}+∑\frac{A_i}{s-p_i}\] 经过拉普拉斯反变换:
\[r(t)=∑A_ke^{p_kt}u(t)+∑A_ie^{p_it}u(t)\] 可以发现\(r(t)\)受到两部分的影响:系统方程和输入信号:称\(r(t)\)受输入影响的部分为强迫响应,受系统方程影响的部分为自由响应。
瞬态响应和稳态响应
分析时域中的\(r(t)\)构成,表达式的常数项不会受到\(t\)变化的影响,\(r(t)\)的常数项称为稳态响应。\(r(t)\)中受到\(t\)影响的部分称为瞬态响应。
系统稳定性
s域图像
由\(s=σ+jω\),因此可以将任何一个值在以实部\(σ\)为横轴,虚部\(jω\)为纵轴的s域中的一个点来表示。
在s域图像中,系统方程的极点以×表示,系统方程的零点以◯表示。
连续系统的稳定性
在时域中有: \[∫|h(t)|dt<∞\] 满足上述条件的系统是稳定系统。
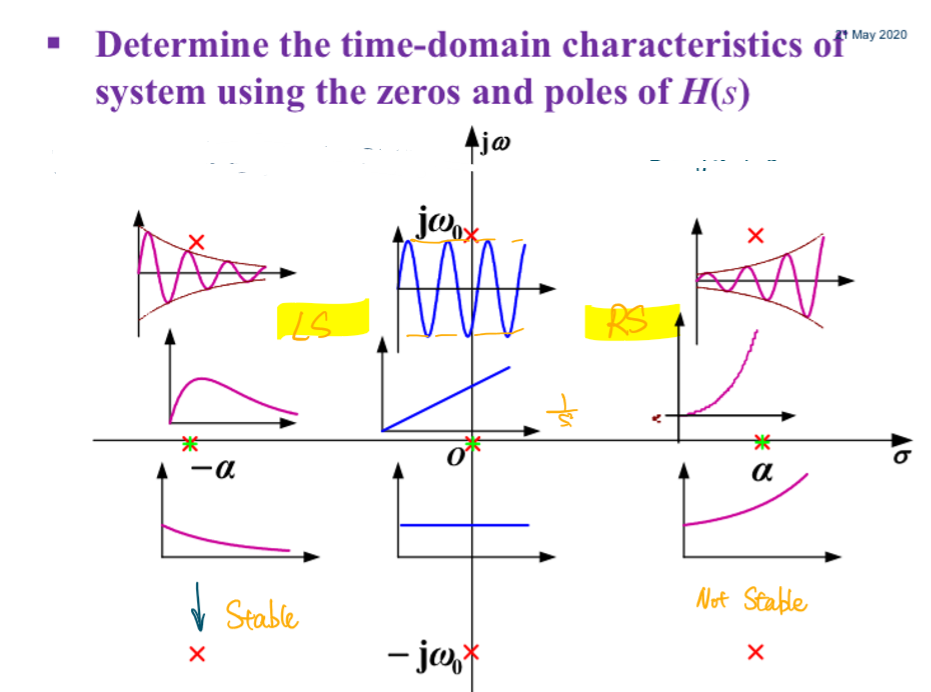
在s域中,如果所有的极点都在s域图像的左侧,即\(σ<0\),满足系统稳定的条件。当所有极点都在虚轴上且为一阶时,这个系统是严格的稳定系统。
离散系统的稳定性
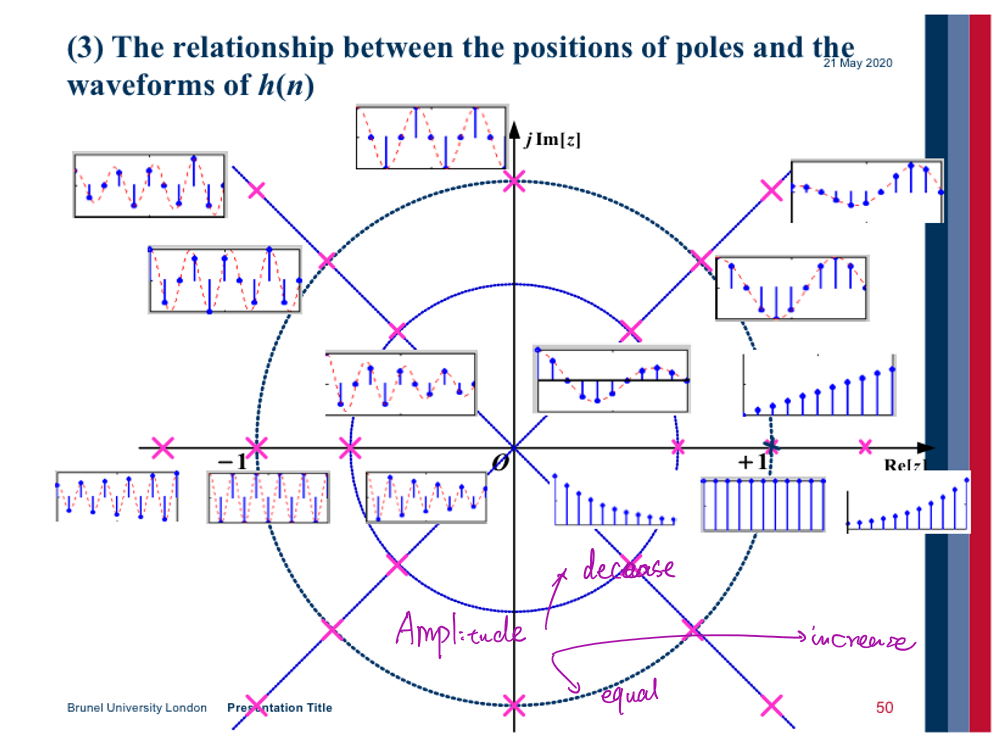
由\(z=e^{sT}\),当\(s=0\)时,\(z=1\),因此如果极点在z域的单位圆内,离散系统是稳定系统,在单位圆外,系统是非稳定系统。
由连续系统稳定性推导离散系统稳定性的过程:控制系统:数字系统稳定性