07. PID 控制系统
本文最后更新于 2025年6月4日 晚上
PID 控制系统
基本PID控制元件
控制器是在控制系统中用于控制系统误差的一种元件,其输入信号为系统误差。PID控制器是控制系统中最常用的控制器类型,基本的控制器有P控制器、I控制器、D控制器三种。这个控制器把收集到的数据和一个参考值进行比较,然后把这个差别用于计算新的输入值,这个新的输入值的目的是可以让系统的数据达到或者保持在参考值。PID控制器可以根据历史数据和差别的出现率来调整输入值,使系统更加准确而稳定。PID控制器的比例单元(P)、积分单元(I)和微分单元(D)分别对应目前误差、过去累计误差及未来误差。若是不知道受控系统的特性,一般认为PID控制器是最适用的控制器。藉由调整PID控制器的三个参数,可以调整控制系统,设法满足设计需求。控制器的响应可以用控制器对误差的反应快慢、控制器过冲的程度及系统震荡的程度来表示。
P 控制器/比例控制器
P控制器,又称比例控制器(Proportional controller),其传输函数为:
\[D_c(s)=K_P\] \(K_p\)称为比例增益。
P控制器的系统输出与输入的系统误差\(e\)成比例:
\[y(t)=K_Pe\] 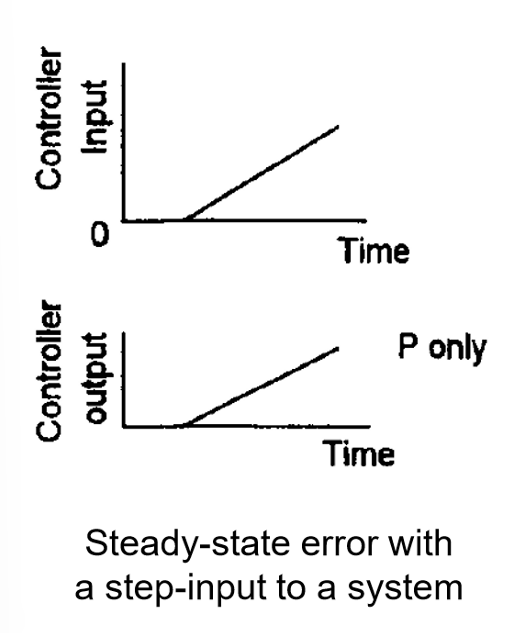
P控制器可以降低上升时间\(t_r\),但是无法消去稳态误差。
I 控制器/积分控制器
I控制器,又称积分控制器(Intergral controller),传输函数为:
\[D_c(s)=\frac{K_I}{s}\] \(K_I\)称为积分增益。
P控制器的系统输出与输入的系统误差\(e\)的积分成比例:
\[y(t)=K_I∫edt\] 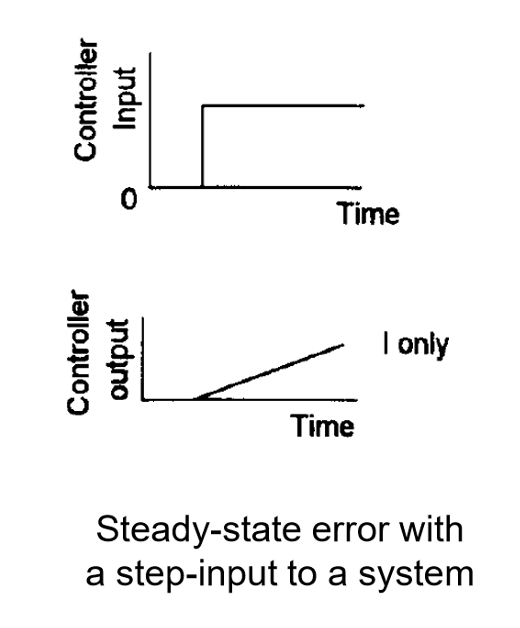
I控制器可以通过增加一个极点\(s=0\)来消去稳态误差,但是会增加系统的类型,使得系统的稳定性降低、瞬态响应变化更加剧烈。
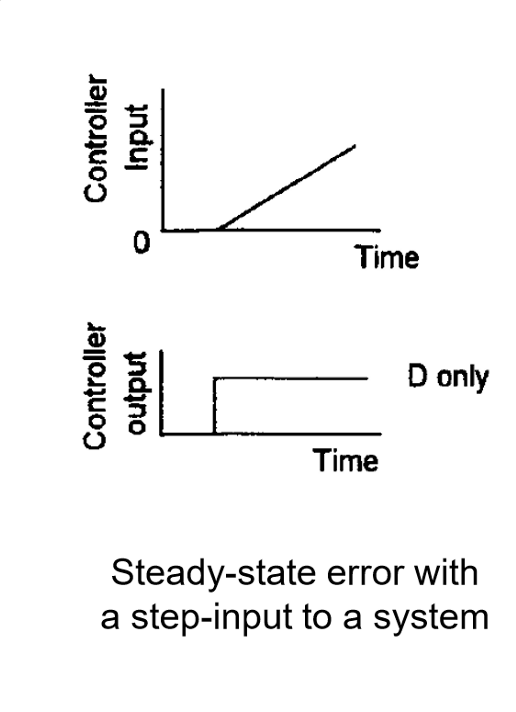
D 控制器/微分控制器
D控制器,又称微分控制器(Derivative controller),传输函数为:
\[D_c(s)=K_Ds\] \(K_I\)称为积分增益。
P控制器的系统输出与输入的系统误差\(e\)的微分成比例:
\[y(t)=K_D \frac{d}{dt}e\]
D控制器通过增加一个零点来改进系统稳定性、并使得瞬态响应变化更平稳、过冲率降低,但是会放大高频噪声。由于稳态误差信号为常数信号,斜率为0,因此D控制器对稳态误差信号没有响应。
组合控制器
由于P/D/I控制器单独使用都有缺陷,因此在工程设计上常常将其组合使用。
PI 控制器
PI控制器相比于I控制器能够在零频上对增益进行补偿,因此可以减小稳态误差。
PI控制器的传递函数为:
\[D_c(s)=\frac{K}{s}(s+\frac{1}{T_1})=K+\frac{K}{T_1s}\]
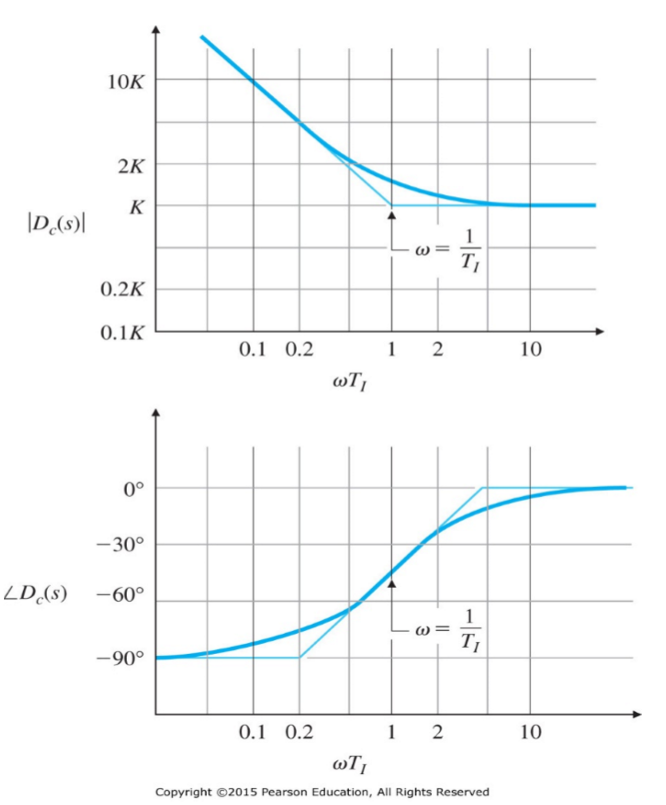
通过其波特图可以发现:PI控制器通过减少系统在高频部分的增益来减少相位裕量,同时系统的高频分量常常是噪声,因此PI控制器也可以起到限制噪声的作用。
同时,由于\(\lim_{s→∞}D_c(s)=K\),PI控制器没有稳态误差(Offset)。
PD 控制器
由于D控制器对稳态误差没有响应,因此在使用时常常与P控制器连用以改进这一特性。
PD控制器的传递函数为:
\[D_c(s)=T_Ds+1\]
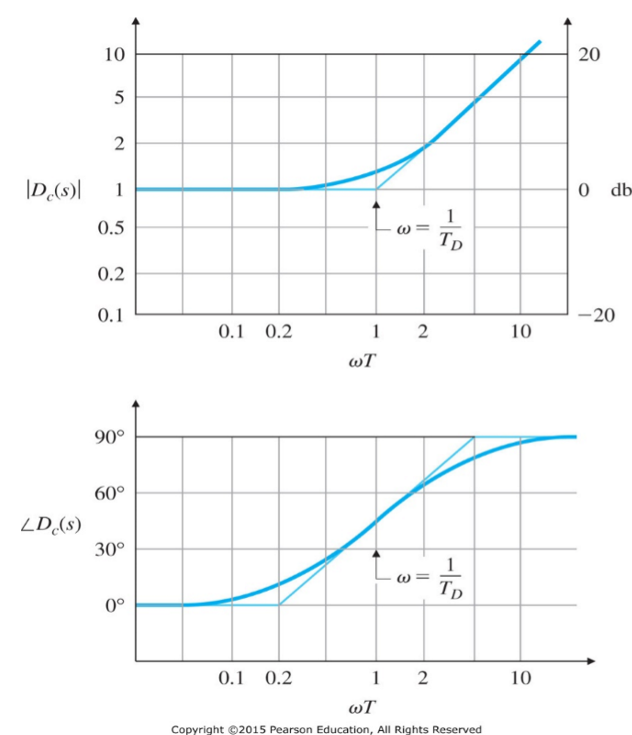
通过其波特图可以发现:PD控制器降低了系统在低频部分的增益,同时增加了在高频部分的增益,因此PD控制器增加了相位裕量。
但同时由于系统噪声常常位于高频,PD控制器也会放大系统的噪声。
PID 控制器
PID控制器能够减小系统响应的振荡,同时PID控制器自身不会有稳态误差。
PID控制器的传输函数为:
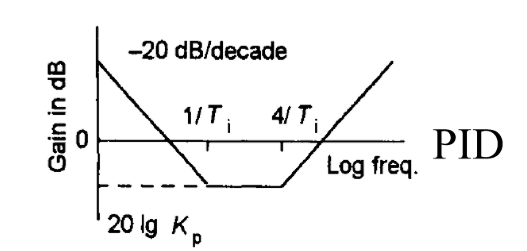
\[D_c(s)=K_P+\frac{K_I}{s}+K_Ds···\text{并联形式}\] \[D_c(s)=K_P(1+\frac{1}{T_is}+T_ds)···\text{标准形式}\] 其中,\(T_i=\frac{K_P}{K_I}\),\(T_d=\frac{K_D}{K_P}\)
PID控制器的波特图形状取决于\(T_i\)和\(T_d\)的值,通常取\(T_i=4T_d\):
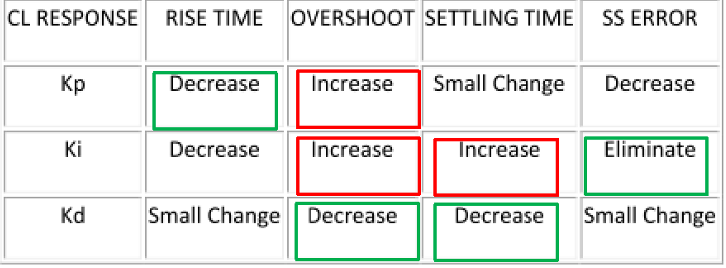
下图展示了PID控制器中参数调节对其阶跃响应的影响。
PID控制器的调节方法
通过实验对PID控制器进行调整的方法称为齐格勒-尼科尔斯方法(Ziegler-Nichols method),其方法包括两种调节方式:
- 阶跃响应法
- 频率响应法
阶跃响应法
阶跃响应法(Step response method)适用对象是系统的阶跃响应呈现“s”形状的曲线,如下图所示:
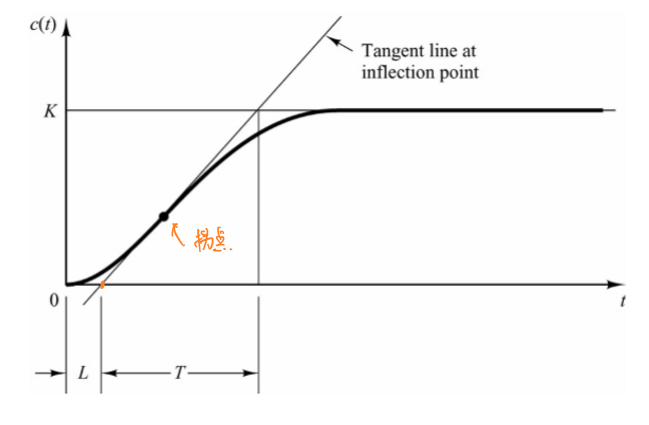
这个曲线可以描述为:
\[\frac{C(s)}{U(s)}=\frac{Ke^{-Ls}}{Ts+1}\] 其中曲线拐点(曲线二阶导为0的点)对应的切线与\(x\)轴的交点将\(x\)轴分为两部分:\(L\)和\(T\),其中\(T\)是拐点处的切线与\(c(t)=K\)(即渐近线/最大值)的交点所对应的\(x\)轴坐标到切线与\(x\)轴的交点的距离;\(L\)是切线与\(x\)轴的交点到坐标原点的距离。
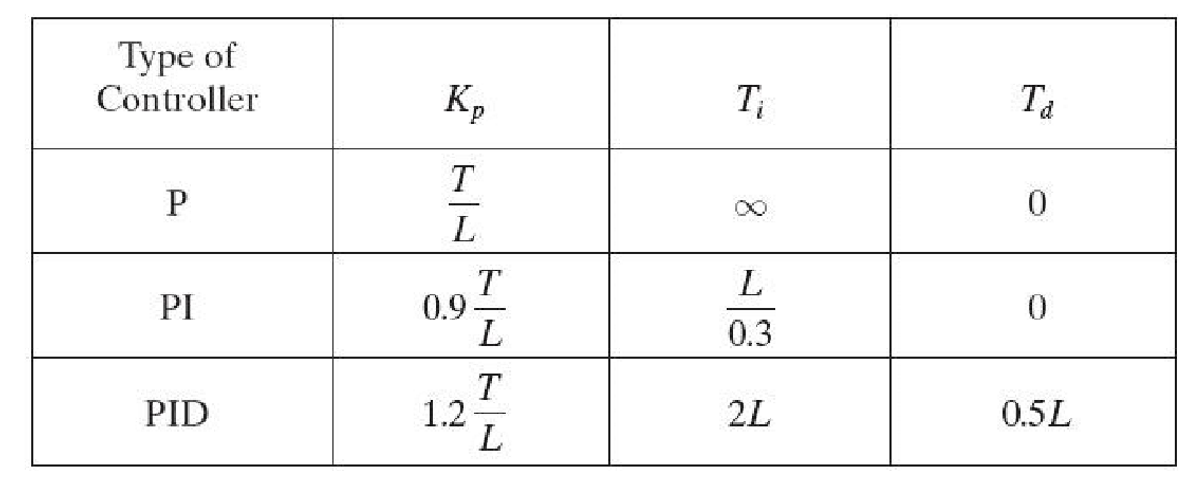
根据曲线可以得到\(K\)、\(L\)、\(T\)三个常数,并依据如下的表格进行PID控制器的设计:
频率响应法
频率响应法(Frequncy response method)适用于需要改进的系统(plant)在s域原点存在零点。
频率响应法的步骤是:
- 首先应用P控制器改进开环传递函数,改进后系统的闭环传递函数为:
\[\frac{C(s)}{R(s)}=\frac{K_P+∏(s+z_i)}{K_P+∏(s+p_i)}\] - 将\(K_P\)的值增加,直到系统达到临界稳定条件,得到此时的\(K_P=K_{cr}\)。
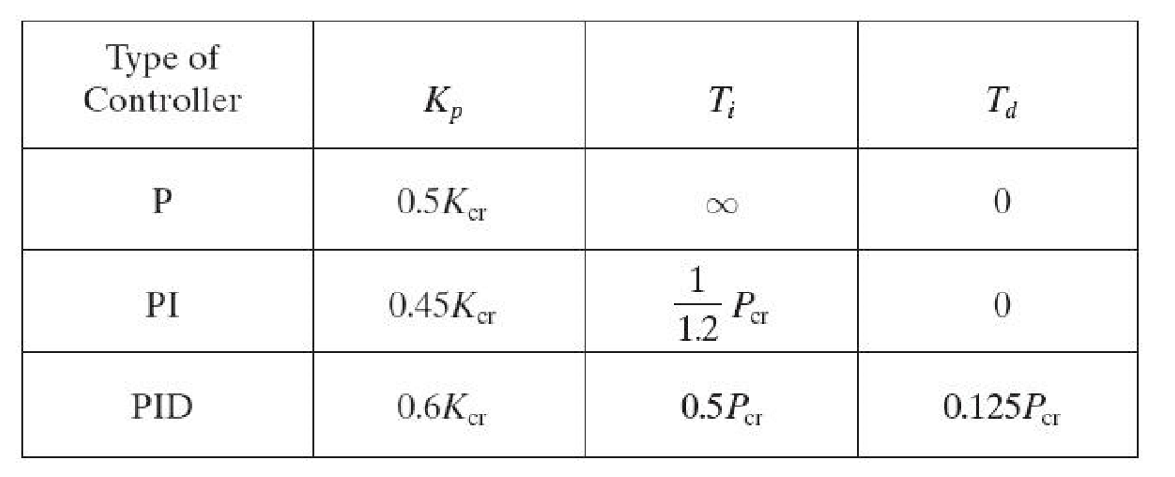
或者应用劳斯判据求出劳斯表第一列每一项等于0时最小的\(K_P\)得到此时的\(K_P=K_{cr}\)。 - 根据系统闭环传递函数的特征方程,求得方程\(K=K_{cr}\)时的解,对应角频率\(ω_{cr}\),根据\(P_{cr}=\frac{2π}{ω_{cr}}\)找到系统临界稳定时系统阶跃响应的振荡周期\(P_{cr}\)。
- 根据下表得到PID控制器的参数并设计。
在MATLAB中可以使用PID Tuner应用,选择“import new plant”导入使用tf()命令生成的系统传递函数,选择“show parameter”展示当前PID控制器的参数,并对其进行调制,直到满足设计要求。
PID控制器的改进
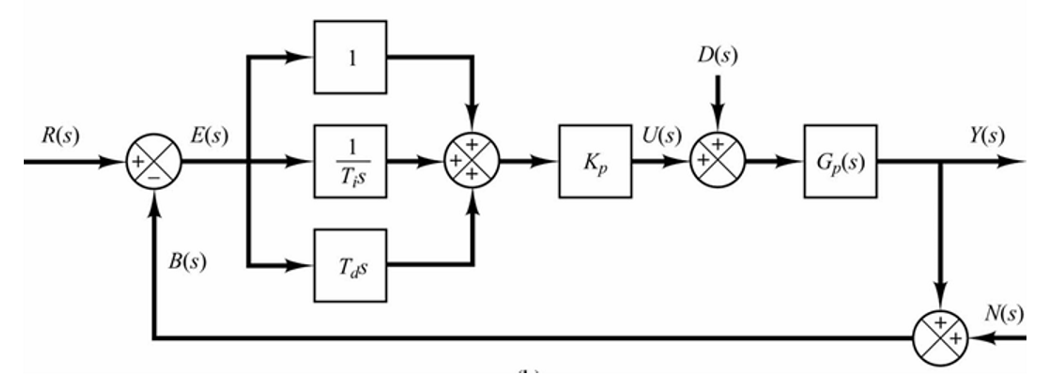
对于常规的PID系统(如下图所示),如果输入信号\(R(s)\)为阶跃函数时,由于控制中出现的微分项\(T_ds\),控制模块的输出:操纵变量中会含有冲激函数(\(\frac{d}{dt}u(t)=δ(t)\))。
为了解决这一办法,通常应用常规PID系统时,会对微分项进行修正:
\[T_ds⇒\frac{T_ds}{1+γT_ds},γ≈0.1\] 这样的修正虽然可以保证操纵变量中没有冲激函数,但是操纵变量中仍然会存在一个多余的脉冲函数(这种现象称为set-point kick)。
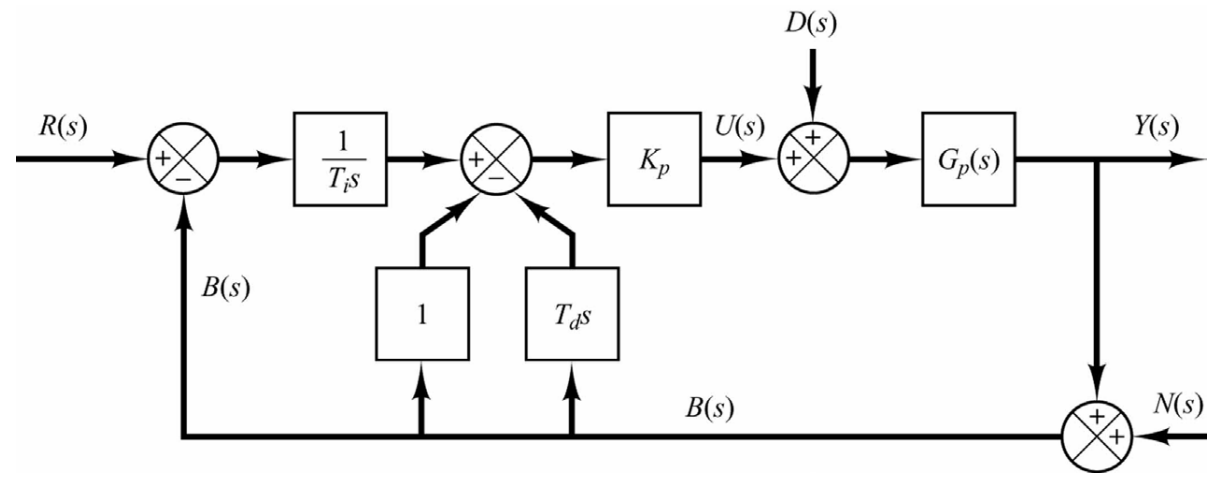
PI-D控制器和I-PD控制器
一种改进的方法是将微分模块放置在系统的反馈部分,这样使得前馈信号不会受到影响。
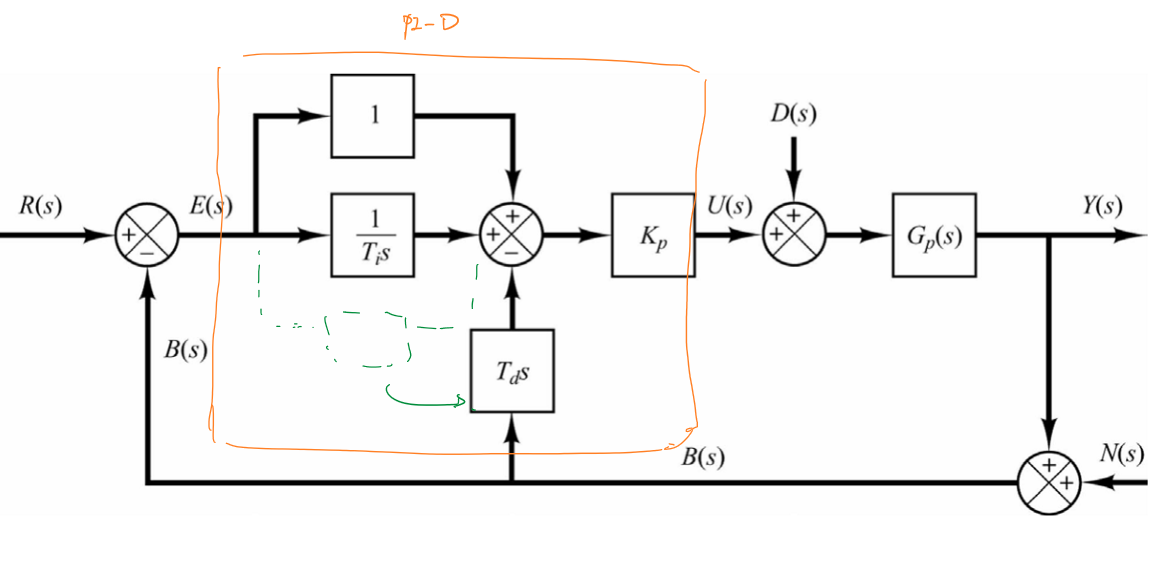
此外由于D控制器无法对稳态误差进行响应,因此可以将比例模块和微分模块同时设置在系统的反馈部分,称为I-PD控制器。
系统自由度
单自由度系统及设计
标准的PID系统中,其三个输入:系统输入\(R(s)\)、反馈噪声\(N(s)\)和干扰\(D(s)\)的闭环传递函数可以知一推三,称为单自由度PID控制系统。
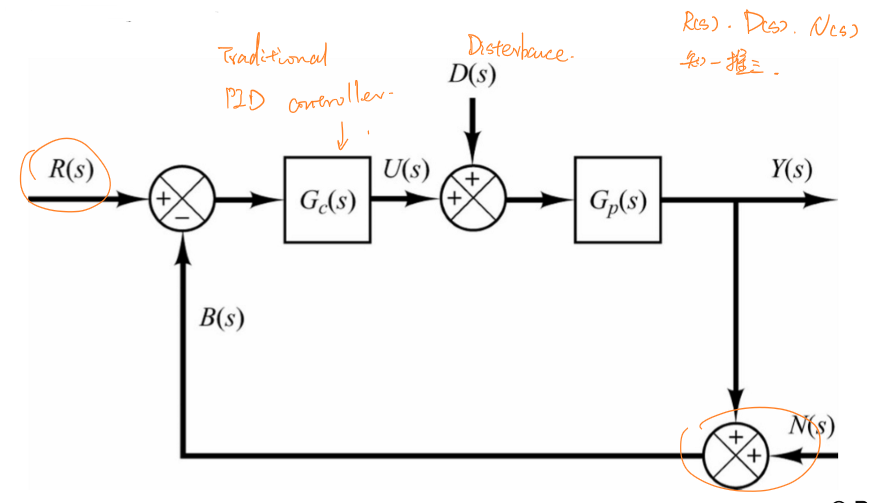
从上图中可以得出:
\[G_{yr}=\frac{Y(s)}{R(s)}=\frac{G_cG_p}{1+G_cG_p}\] \[G_{yd}=\frac{Y(s)}{D(s)}=\frac{G_p}{1+G_cG_p}\] \[G_{yn}=\frac{Y(s)}{N(s)}=-\frac{G_cG_p}{1+G_cG_p}\]
可以得到:
\[G_{yr}=\frac{G_p-G_{yd}}{G_p}\] \[G_{yn}=\frac{G_{yd}-G_p}{G_p}\] PID控制系统的传递函数又可以写作如下形式:
\[G_c(s)=\frac{K(as+1)(bs+1)}{s}\]
对如图所示的系统,如果\(G(s)\)为二阶,且假设整个系统的闭环传递函数的极点多项式为\((s+p_0)(s^2+2ζω_ns+ω_n)\),可以发现极点为三部分组成:其中两个极点共轭:\(s=a±jb\),另一个极点为实数,且通常取\(p_0=5ζω_n\)使得实极点对系统响应的影响较小。
可以根据系统设计的要求得到\(ζ\)和\(ω_n\),并得到\((s+p_0)(s^2+2ζω_ns+ω_n)\)。通过展开这个多项式,应用待定系数法可以得到\(a,b,K\)的值。
去零法
对系统:
\[\frac{Y(s)}{R(s)}=\frac{p(s)}{s^{n+1}+a_ns^n+...+a_2s^2+a_1s+a_0}\] 如果将极点多项式\(p(s)\)设置为零点多项式的低次项,比如:
\[p(s)=a_2s^2+a_1s+a_0\] 如此,系统的阶跃、一阶(\(R(s)=s\))、二阶响应(\(R(s)=\frac{1}{2}s^2\))将会没有稳态误差,这种方法称为去零法(zero-placement approach)。
双自由度系统
整个系统的闭环传输函数中如果三个开环增益中的一个已知,则另外两个中一个已知,另一个未知,这样的系统称为双自由度系统,如下图所示:
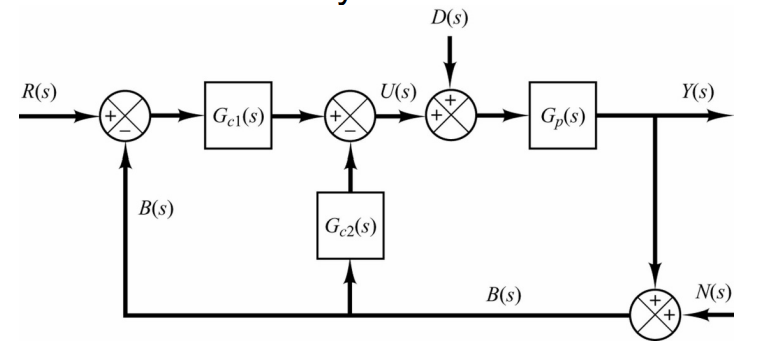
\[G_{yr}=\frac{Y(s)}{R(s)}=\frac{G_{c1}G_p}{1+(G_{c1}+G_{c2})G_p}\] \[G_{yd}=\frac{Y(s)}{D(s)}=\frac{G_p}{1+(G_{c1}+G_{c2})G_p}\] \[G_{yn}=\frac{Y(s)}{N(s)}=-\frac{(G_{c1}+G_{c2})G_p}{1+(G_{c1}+G_{c2})G_p}\] 可以推出:
\[G_{yr}=G_{c1}G_{yd}\] \[G_{yn}=\frac{G_{yd}-G_p}{G_p}\]
双自由度系统的优点
双自由度PID控制器可以解决常规PID控制器在实际应用中不兼容的问题。
双自由度系统有:
- 非常低的过冲
- 不容易受干扰影响
- 调节时间很短